Interfacing the real world: Actuators
Light
LED - Light emitting diode
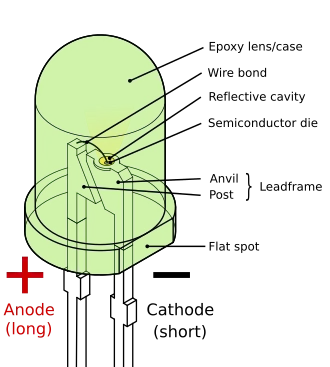
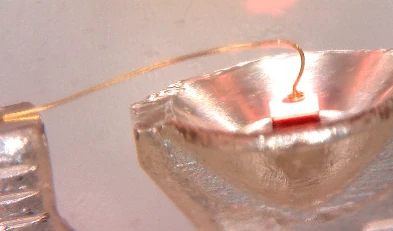
A light-emitting diode (LED) is a semiconductor device that emits light when current flows through it. Electrons in the semiconductor recombine with electron holes, releasing energy in the form of photons. The color of the light (corresponding to the energy of the photons) is determined by the energy required for electrons to cross the band gap of the semiconductor.
Sparkfun LED guide
All About LEDs on lear.adafruit
RGB LEDs
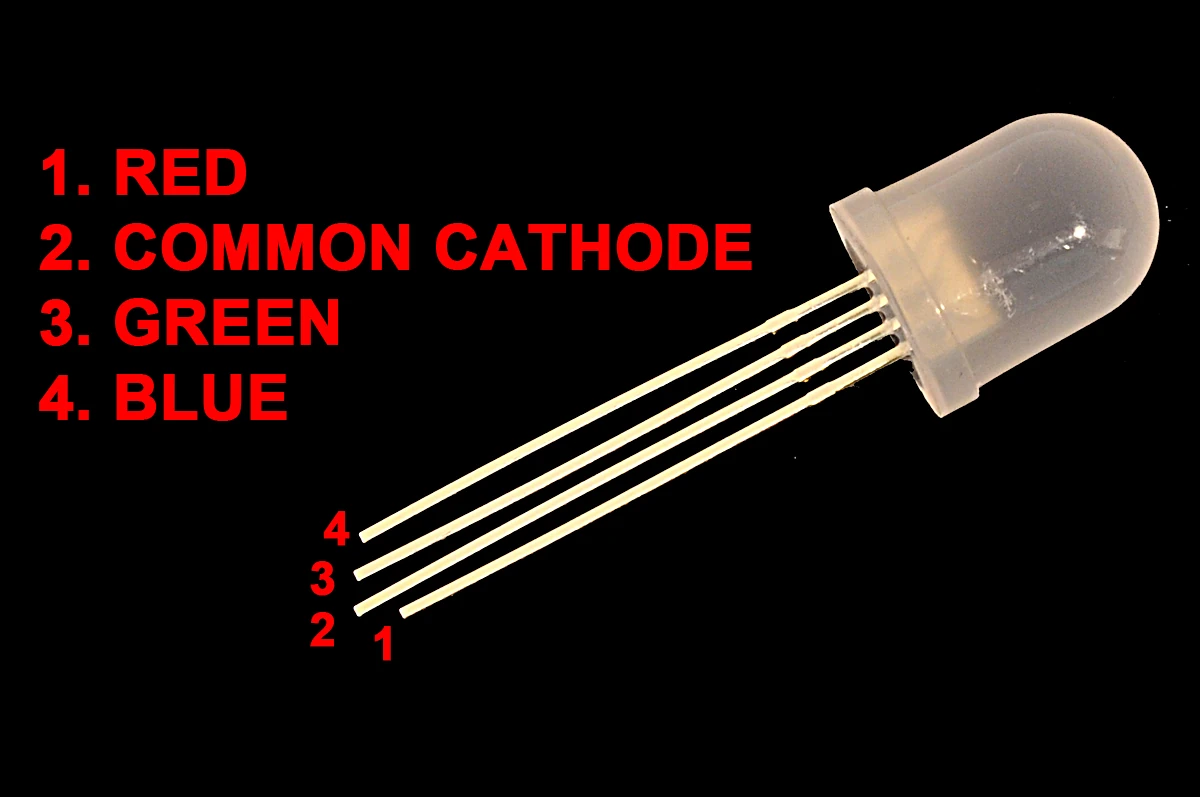
RGB (Red-Green-Blue) LEDs are actually three LEDs in one! But that doesn't mean it can only make three colors. Because red, green, and blue are the additive primary colors, you can control the intensity of each to create every color of the rainbow. Most RGB LEDs have four pins: one for each color, and a common pin. On some, the common pin is the anode, and on others, it's the cathode.
📖 sparkfun
Addressable LEDs
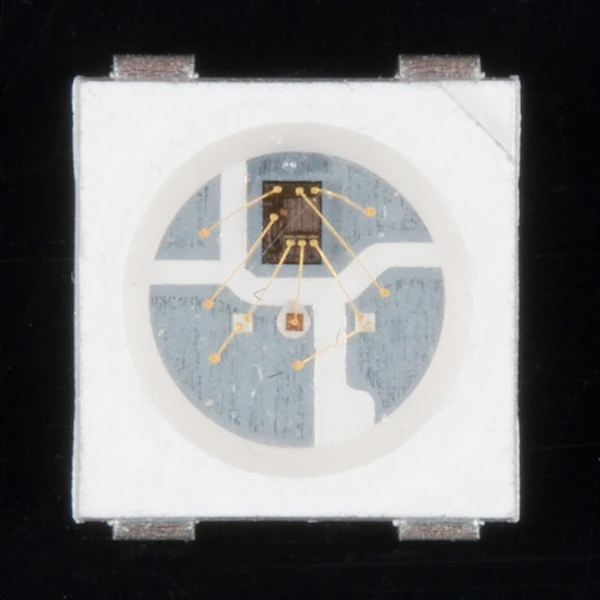
Digital RGB addressable LEDs contain their own "smart" control electronics. In addition to power and ground, these provide connections for data-in, data-out, clock and sometimes a strobe signal. These are connected in a daisy chain. Data sent to the first LED of the chain can control the brightness and color of each LED independently of the others.
Addressable LED strip
An LED strip light (also known as an LED tape or ribbon light) is a flexible circuit board populated by surface mounted light-emitting diodes (SMD LEDs) and other components that usually comes with an adhesive backing.


Neopixel Uberguide on learn.adafruit
Addressable led guide on learn.sparkfun
Led strip application examples here, here and here
Adafruit Neopixel library on github.com for Arduino.
Arduino's Fastled library on github.com.
WLED: ESP32 led control focused project
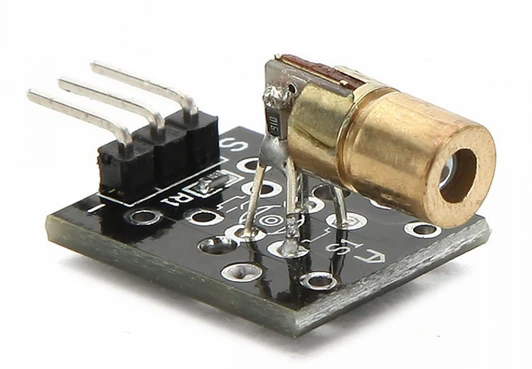
Laser
A laser is a device that emits light through a process of optical amplification based on the stimulated emission of electromagnetic radiation.
A laser differs from other sources of light in that it emits light that is coherent. Spatial coherence allows a laser to be focused to a tight spot, enabling applications such as laser cutting and lithography. It also allows a laser beam to stay narrow over great distances (collimation), a feature used in applications such as laser pointers and lidar (light detection and ranging).
Laser + mirror + sound video on youtube.com
Laser kinetic installation video on youtube.com
Wireless Data Connections Through Light on hackaday.com
Electroluminescent
Electroluminescence (EL) is an optical and electrical phenomenon, in which a material emits light in response to the passage of an electric current or to a strong electric field. This is distinct from black body light emission resulting from heat (incandescence), chemical reactions (chemiluminescence), reactions in a liquid (electrochemiluminescence), sound (sonoluminescence), or other mechanical action (mechanoluminescence), or organic electroluminescence.
EL Wire tutorial on learn.adafruit
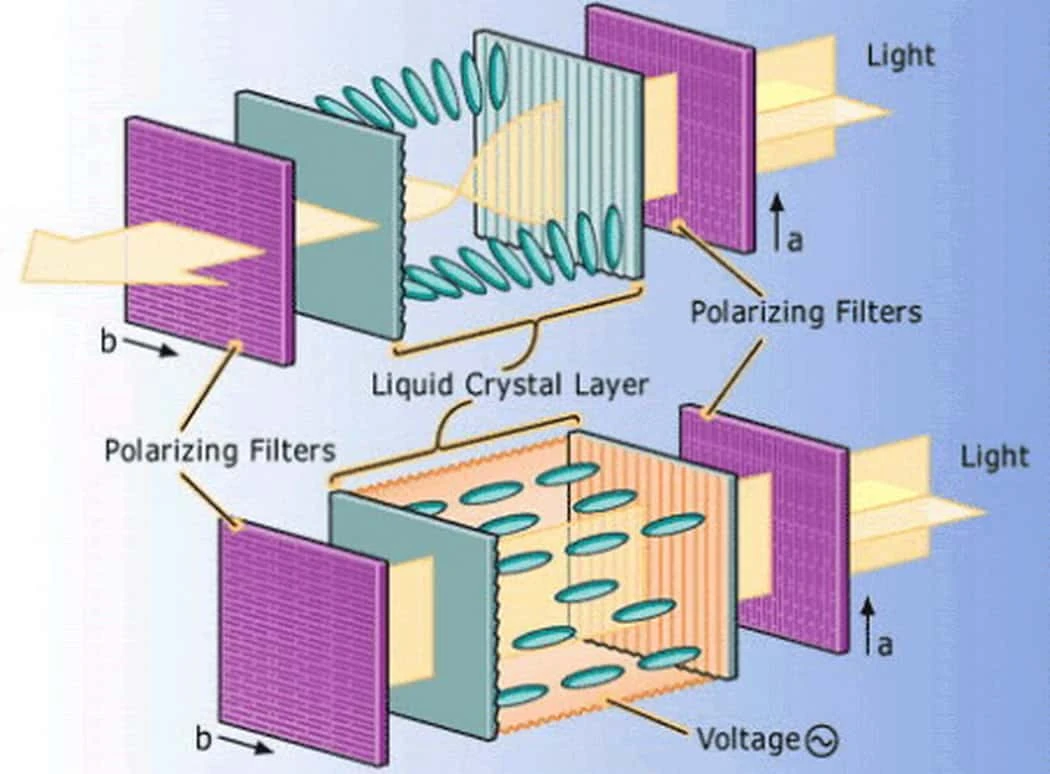
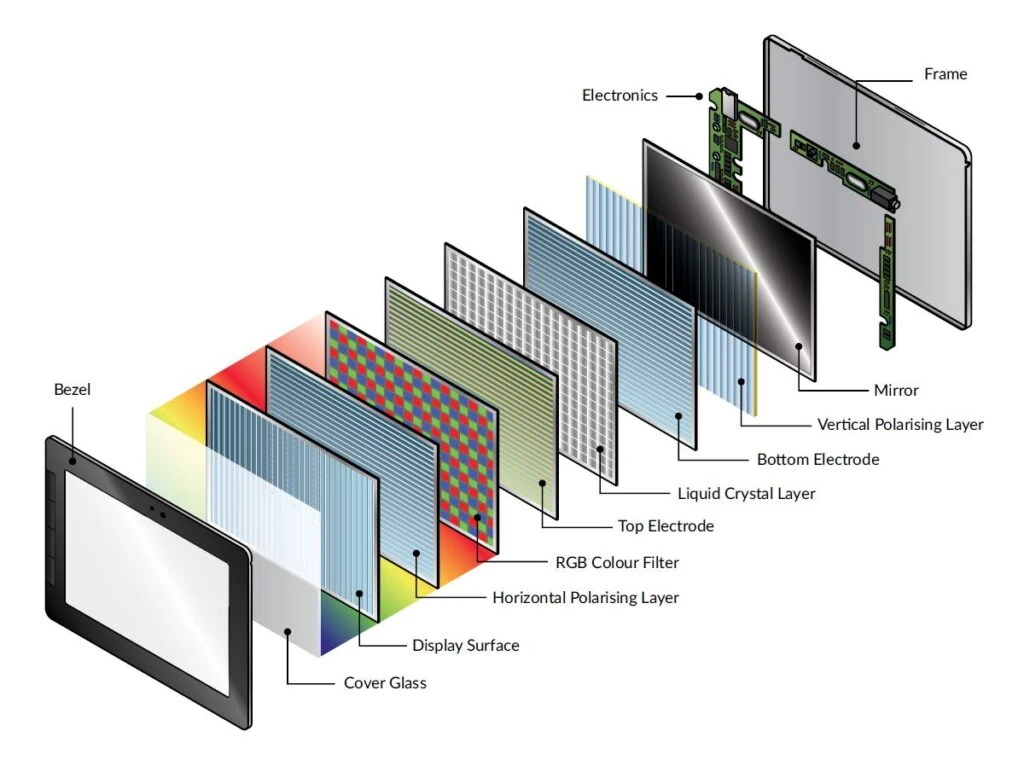
LCD displays
A liquid-crystal display (LCD) is a flat-panel display or other electronically modulated optical device that uses the light-modulating properties of liquid crystals combined with polarizers to display information. Liquid crystals do not emit light directly but instead use a backlight or reflector to produce images in color or monochrome.
Flat panel display on animagraffs.com
How to Control LCD Displays | Arduino Tutorial video on youtube.com
How LCDs Work on howstuffworks.com
Basic Character LCD Hookup Guide on learn.sparkfun
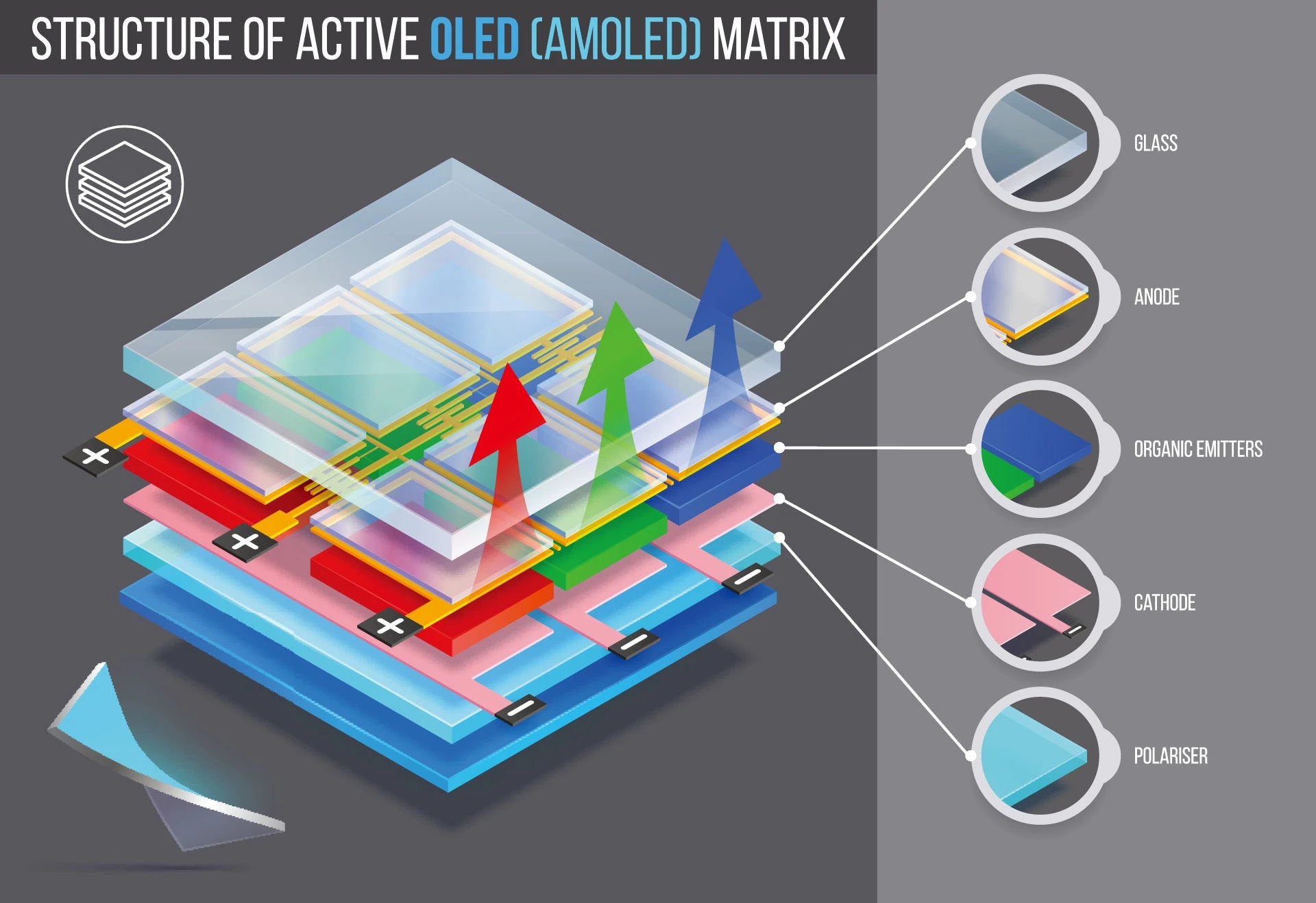
OLED displays
An organic light-emitting diode (OLED), also known as organic electroluminescent (organic EL) diode, is a type of light-emitting diode (LED) in which the emissive electroluminescent layer is an organic compound film that emits light in response to an electric current. This organic layer is situated between two electrodes; typically, at least one of these electrodes is transparent.
What Is OLED And How Does It Work? on scienceabc.com
Sound
Sound pressure or acoustic pressure is the local pressure deviation from the ambient (average or equilibrium) atmospheric pressure, caused by a sound wave. In air, sound pressure can be measured using a microphone, and in water with a hydrophone.
In physics, sound is a vibration that propagates as an acoustic wave through a transmission medium such as a gas, liquid or solid. In human physiology and psychology, sound is the reception of such waves and their perception by the brain. Only acoustic waves that have frequencies lying between about 20 Hz and 20 kHz
Cuando algo se mueve empuja el aire y éste al desplazarse se comprime cambiando su presión, si el movimiento se repite una y otra vez, se generan ondas de alta/baja presión que aunque sean invisibles a nuestros ojos viajan a nuestro alrededor.
Cuando esos cambios de presión llegan a una superficie flexible como nuestro tímpano lo mueven a la misma velocidad a la que se mueve el objeto que originalmente movía el aire. El tímpano al moverse estimula un nervio que tenemos en el oído y éste manda una señal a nuestro cerebro. Así nos damos cuenta de los cambiós de presión en el aire a los cuáles llamamos sonido o ruido.
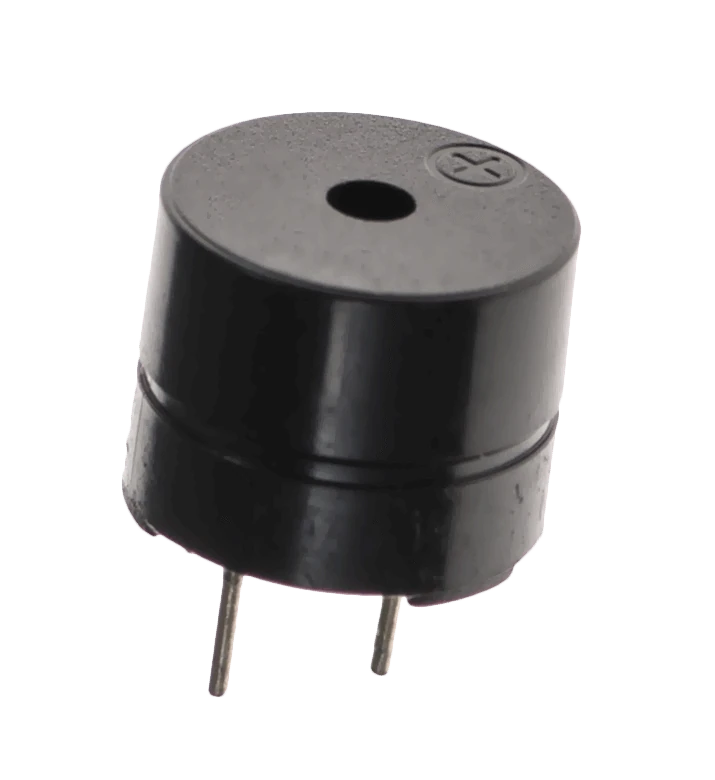
Buzzers
A buzzer or beeper is an audio signaling device, which may be mechanical, electromechanical, or piezoelectric (piezo for short). Typical uses of buzzers and beepers include alarm devices, timers, train and confirmation of user input such as a mouse click or keystroke.
Using Piezo Buzzers with CircuitPython & Arduino on learn.adafruit
How to Play Multiple Buzzers at Once on learn.sparkfun
How to Use Active and Passive Buzzers on the Arduino on circuitbasics.com
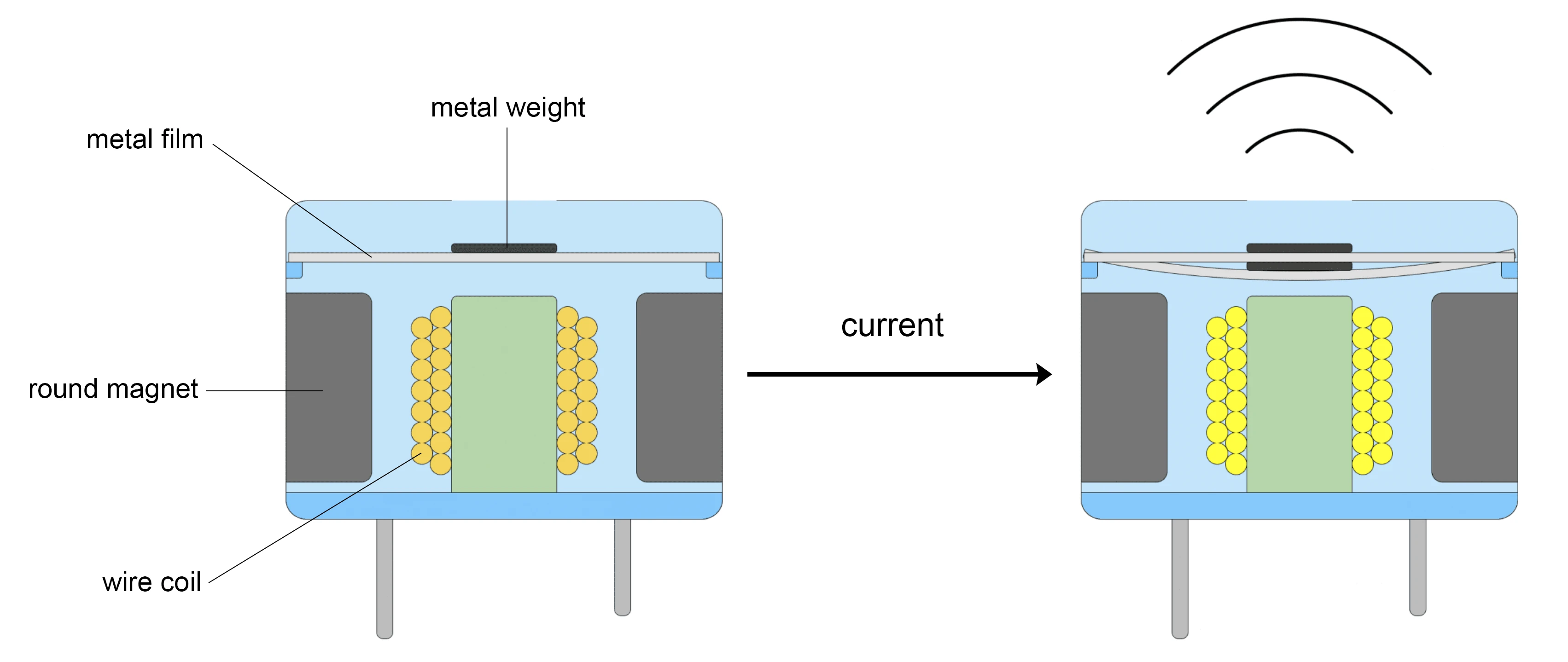
Speakers
A loudspeaker (commonly referred to as a speaker or speaker driver) is an electroacoustic transducer that converts an electrical audio signal into a corresponding sound.
A speaker system, also often simply referred to as a speaker or loudspeaker, comprises one or more such speaker drivers, an enclosure, and electrical connections possibly including a crossover network. The speaker driver can be viewed as a linear motor attached to a diaphragm which couples that motor's movement to motion of air, that is, sound.
How Speakers Make Sound video
Nice page about Speakers on animagraffs.com
Building DIY excellent quality and cheap flat speakers video
Know Audio A Loudspeaker Primer on hackaday.com
Surface transducers
A transducer is a device that converts energy from one form to another. Usually a transducer converts a signal in one form of energy to a signal in another.
Piezo Transducers Could Turn Displays Into Speakers on hackaday.com
World’s Best Speakers! video on youtube.com
Movement
Electric Motors
An electric motor is an electrical machine that converts electrical energy into mechanical energy. Most electric motors operate through the interaction between the motor's magnetic field and electric current in a wire winding to generate force in the form of torque applied on the motor's shaft. An electric generator is mechanically identical to an electric motor, but operates in reverse, converting mechanical energy into electrical energy.
Adafruit Motor Selection Guide on learn.adafruit
Motors and Selecting the Right One on learn.sparkfun
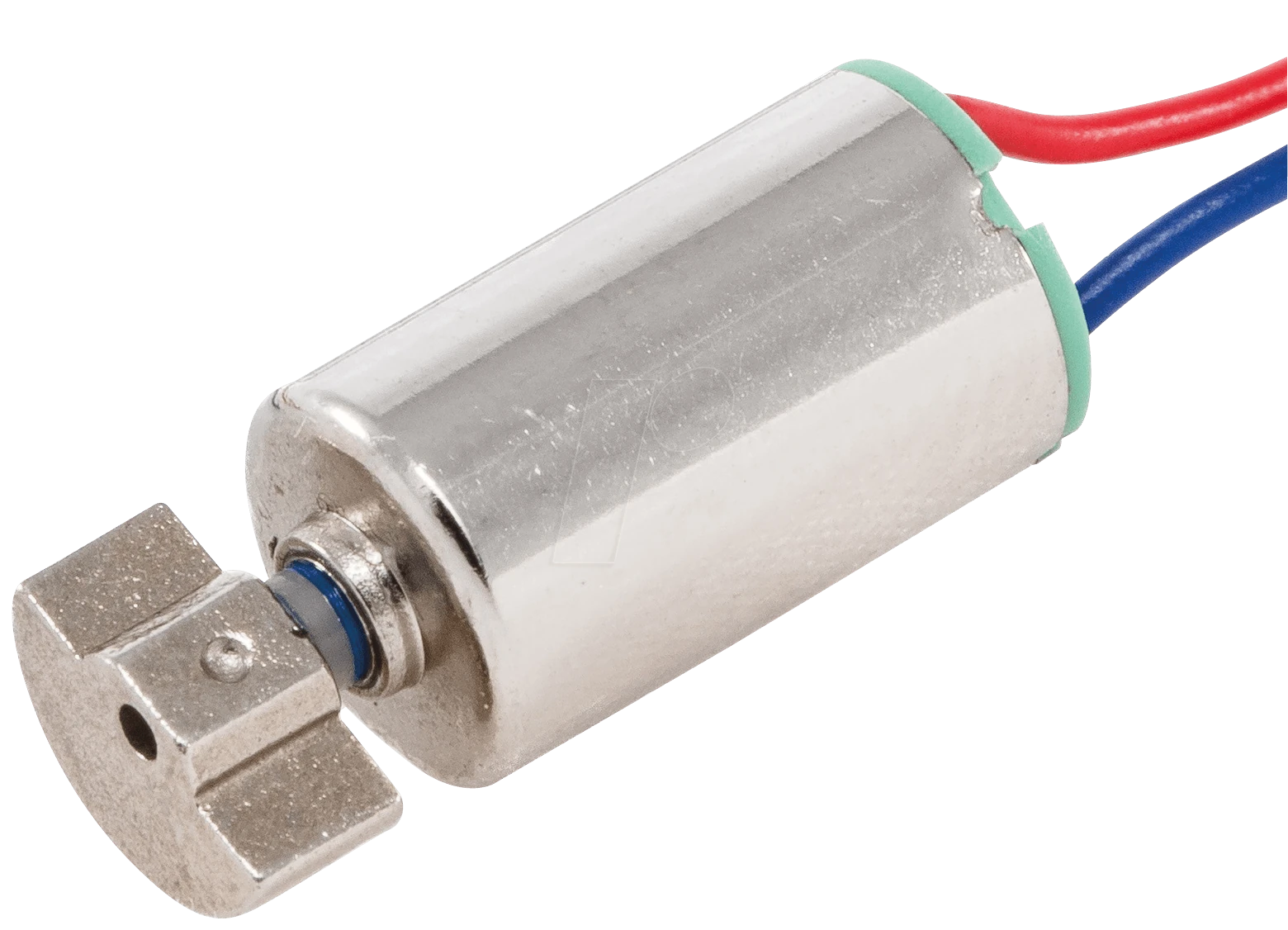
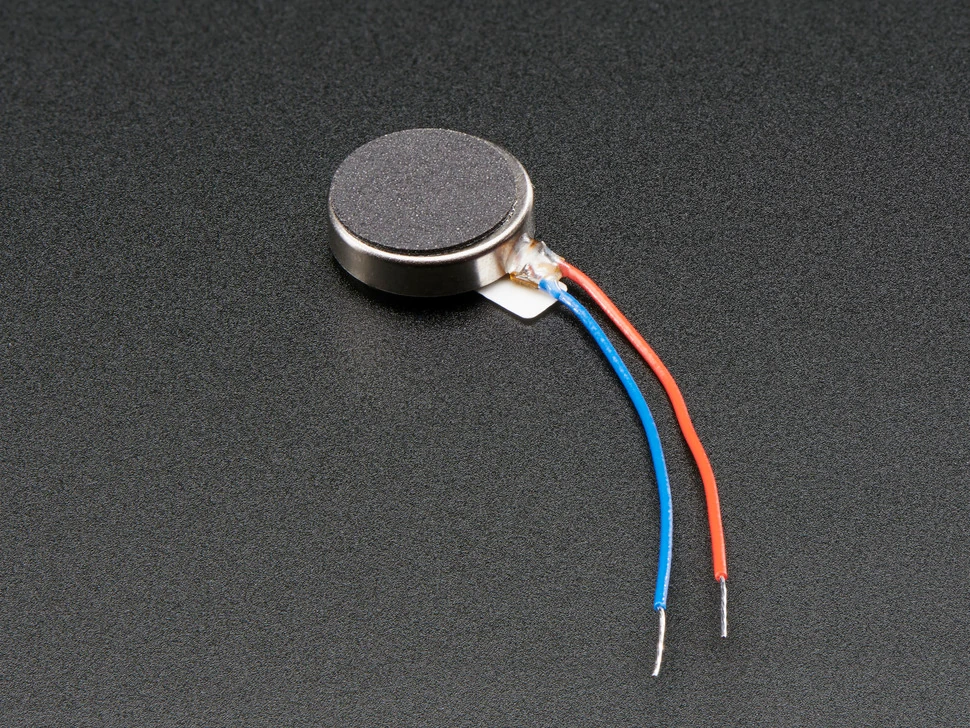
Vibration motors
When smartphones and pagers vibrate, the vibrating alert is produced by a small component that is built into the phone or pager. Many older, non-electronic buzzers and doorbells contain a component that vibrates for the purpose of producing a sound.
The vibrations are produced by an electronic component called a vibration motor (alternatively called a haptic actuator). This component typically consists of a small electric motor with an off-center weight fixed to its output shaft.
Haptic technology page on wikipedia
Many Ways To Drive A Small Motor on hackaday.com
Stepper motor
A stepper motor, also known as step motor or stepping motor, is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can be commanded to move and hold at one of these steps without any position sensor for feedback (an open-loop controller), as long as the motor is correctly sized to the application in respect to torque and speed.
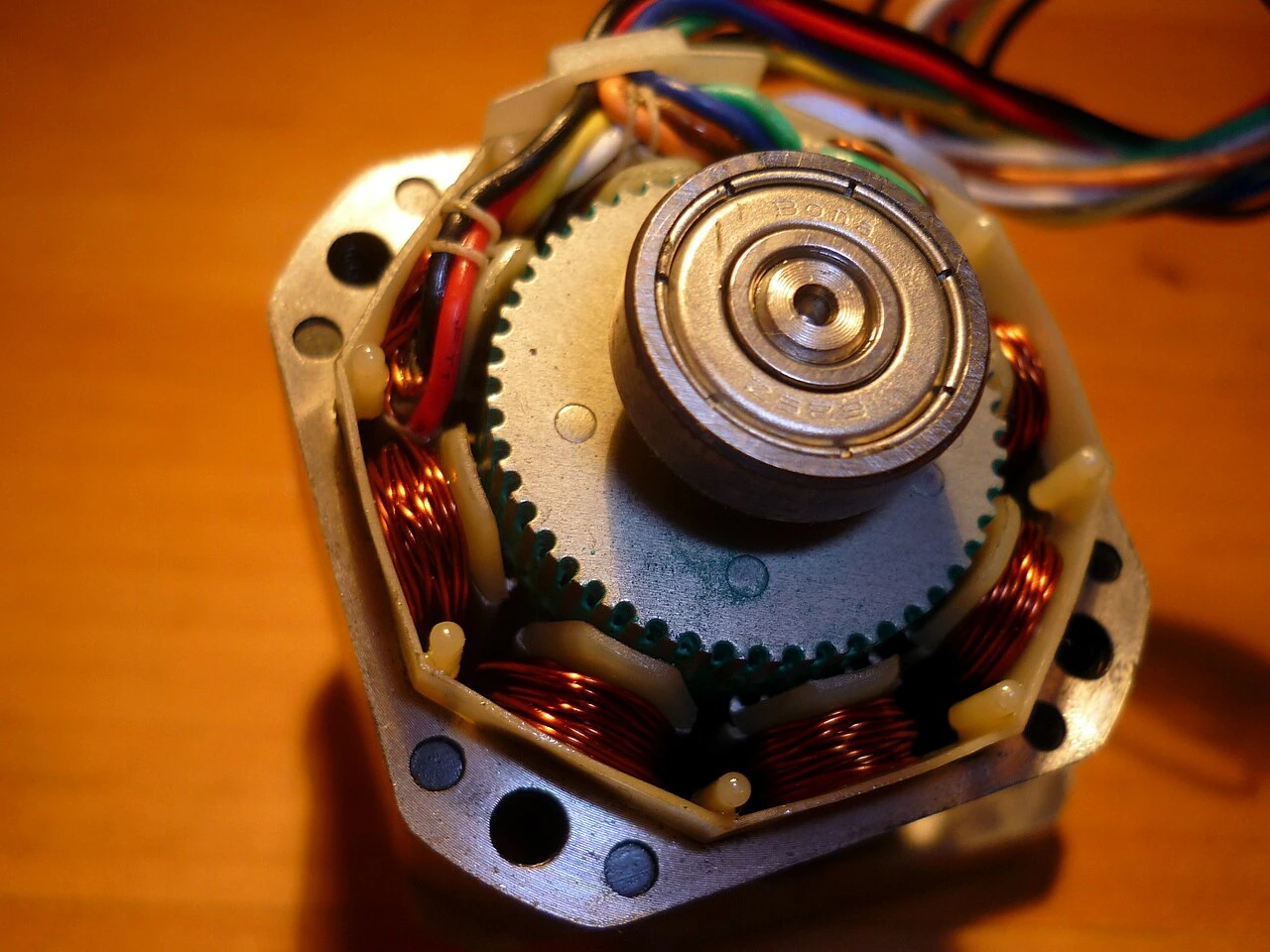
Driving a stepper motor is a bit more complicated than driving a regular brushed DC motor. Stepper motors require a stepper controller to energize the phases in a timely sequence to make the motor turn.
📖 adafruit
All About Stepper Motors in learn.adafruit
Stepper motor category on wiki.reprap
Stepper motor driver category on wiki.reprap
How to control a stepper motor with DRV8825 driver and Arduino on makerguides.com
Convert your stepper motor into an industrial servo with Mechaduino
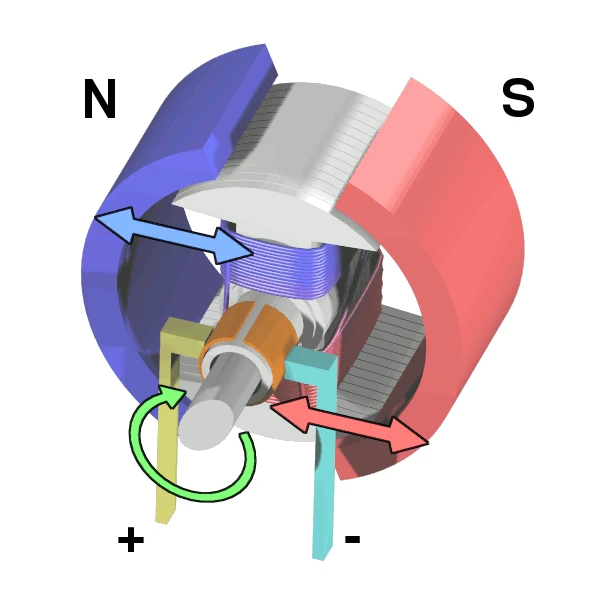
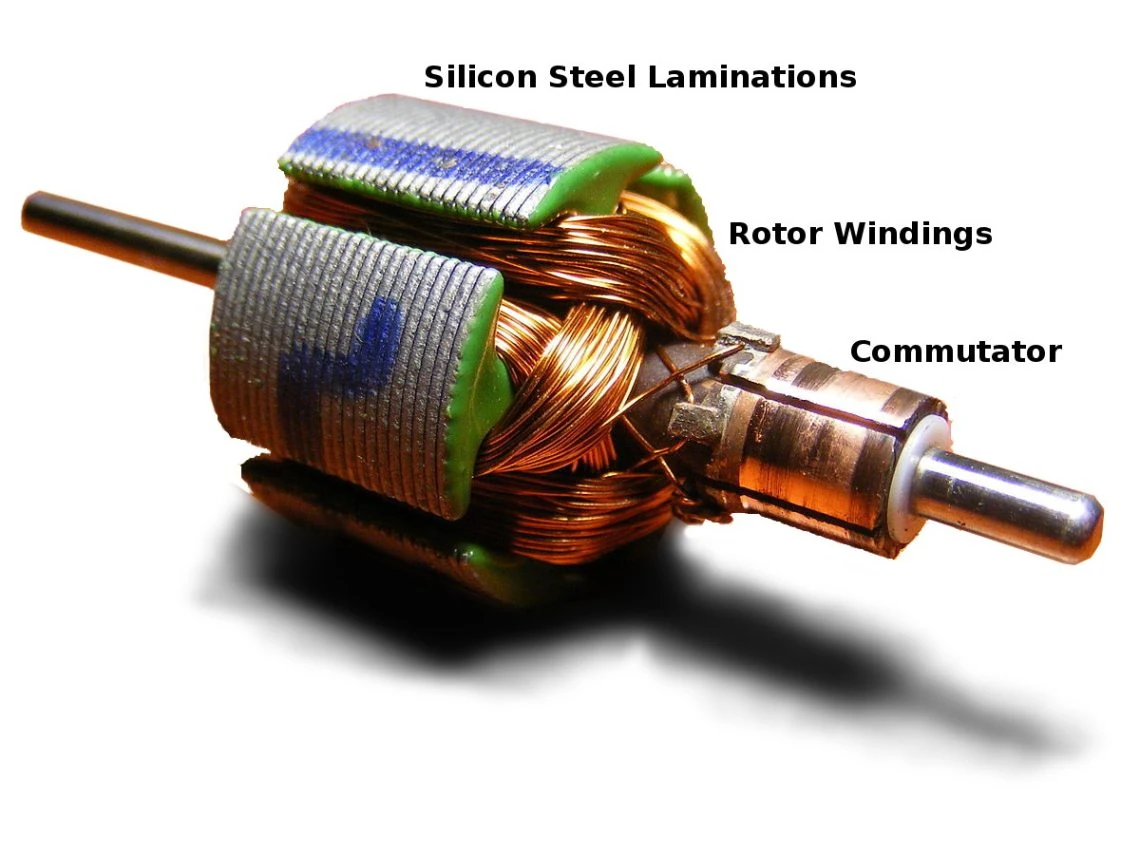
DC motors
A DC motor is an electrical motor that uses direct current (DC) to produce mechanical force. The most common types rely on magnetic forces produced by currents in the coils. Nearly all types of DC motors have some internal mechanism, either electromechanical or electronic, to periodically change the direction of current in part of the motor.

Arduino Lesson 13. DC Motors on learn.adafruit
The Little Things I Didn’t Know About Small DC Motorsa on hackaday.com
Improve Brushed DC Motor Performance on learn.adafruit
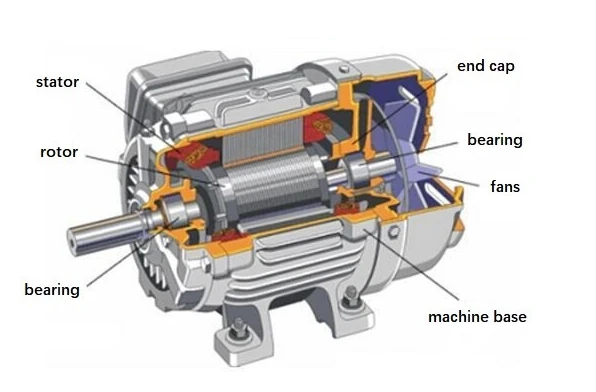
AC motors
An AC motor is an electric motor driven by an alternating current (AC). The AC motor commonly consists of two basic parts, an outside stator having coils supplied with alternating current to produce a rotating magnetic field, and an inside rotor attached to the output shaft producing a second rotating magnetic field. The rotor magnetic field may be produced by permanent magnets, reluctance saliency, or DC or AC electrical windings.

How alternating current motors work?a video on youtube.com
Introduction to AC motor on utmel.com
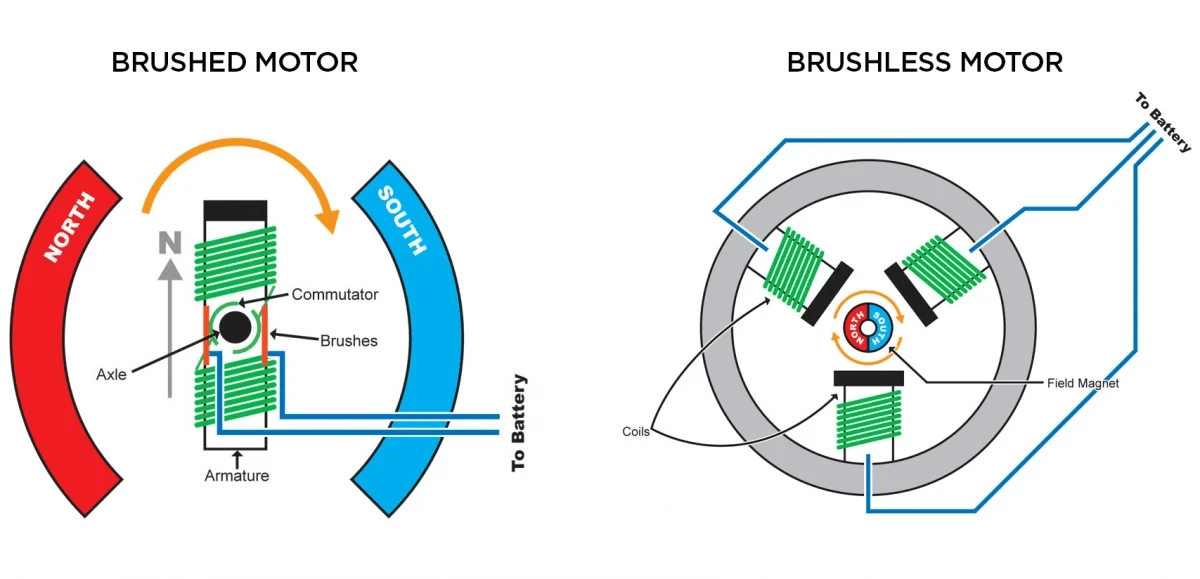
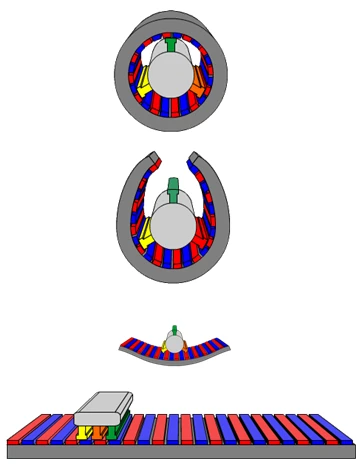
Brushless motors
A brushless DC electric motor (BLDC), also known as an electronically commutated motor, is a synchronous motor using a direct current (DC) electric power supply. It uses an electronic controller to switch DC currents to the motor windings producing magnetic fields that effectively rotate in space and which the permanent magnet rotor follows. The controller adjusts the phase and amplitude of the current pulses that control the speed and torque of the motor. It is an improvement on the mechanical commutator (brushes) used in many conventional electric motors.
Brushless control: SimpleFOCproject for Arduino on simplefoc.com
You Can 3D Print A 12,500 RPM Brushless Motora on hackaday.com
How to select the right power source for a hobby BLDC (PMSM) motor on things-in-motion
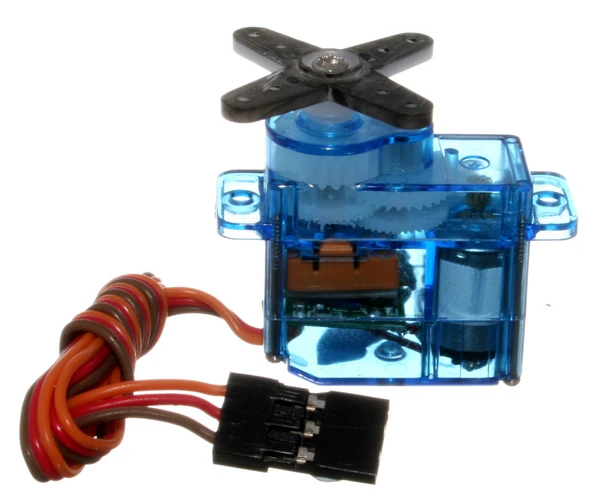
Servo motors
A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity, and acceleration in a mechanical system. It consists of a suitable motor coupled to a sensor for position feedback. It also requires a relatively sophisticated controller, often a dedicated module designed specifically for use with servomotors.

Servo Motors, how do they work? video (Hobby servos)
How a Servo Motor works video (Industrial servos)
How To Make Robots Move Smoothly (with servos) | Arduino Tutorial video
Tutorial on using servo motors with Arduino on adafruit.learn
Servos Explained on learn.sparkfun
Hobby Servo Tutorial on learn.sparkfun
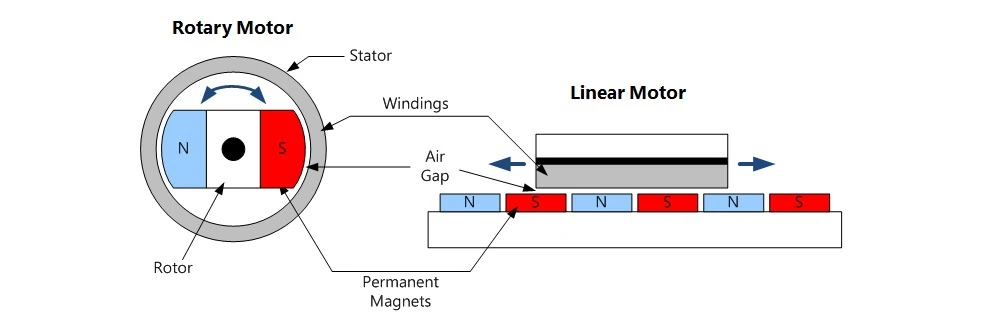
Linear motors
A linear motor is an electric motor that has had its stator and rotor "unrolled", thus, instead of producing a torque (rotation), it produces a linear force along its length. However, linear motors are not necessarily straight. Characteristically, a linear motor's active section has ends, whereas more conventional motors are arranged as a continuous loop.
The 3D printer with no belts video on youtube.com
Solenoid and valves
In engineering, a solenoid is a device that converts electrical energy to mechanical energy, using an electromagnet formed from a coil of wire. The device creates a magnetic field from electric current, and uses the magnetic field to create linear motion.
-- :::danger
-- ## FALTA
-- :::
-- *
-- img
-- 
Relays
-- :::danger
-- ## FALTA
-- :::
-- *
-- img1
-- img2

Pneumatic actuators
-- :::danger -- ## FALTA -- :::
Soft robots
-- :::danger
-- ## FALTA
-- :::
-- *
-- *
-- img
-- 
Pneumatic arm
-- :::danger
-- ## FALTA
-- :::
-- *
-- img
-- 
Exo squeletons
-- :::danger
-- ## FALTA
-- :::
-- *
-- img

Válves
-- :::danger
-- ## FALTA
-- :::

Pistons
-- :::danger
-- ## FALTA
-- :::
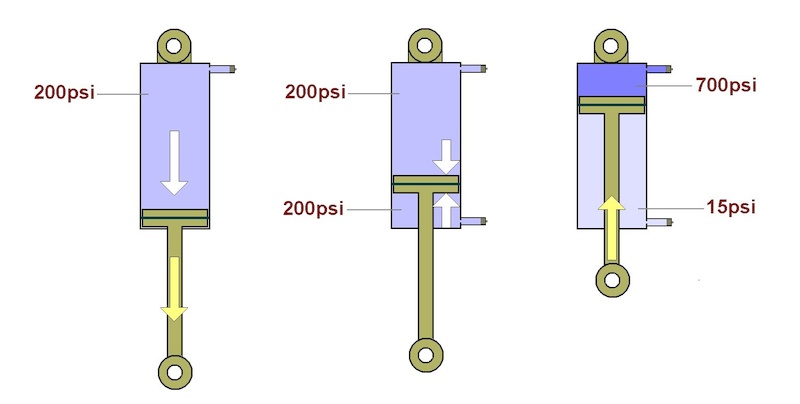
Hidraulic actuators
-- :::danger -- ## FALTA -- :::
Pistons
-- :::danger
-- ## FALTA
-- :::

Artificial muscles
-- :::danger -- ## FALTA -- :::
Artificial muscles, also known as muscle-like actuators, are materials or devices that mimic natural muscle and can change their stiffness, reversibly contract, expand, or rotate within one component due to an external stimulus (such as voltage, current, pressure or temperature).
Artificial Muscles To Bring Relief To Robotic Tenseness in hackaday.con
Pneumatic
-- :::danger -- ## FALTA -- :::
Pneumatic artificial muscles (PAMs) are contractile or extensional devices operated by pressurized air filling a pneumatic bladder. In an approximation of human muscles, PAMs are usually grouped in pairs: one agonist and one antagonist.
They are known under many names, such as McKibben muscles – after their inventor J. L. McKibben, air muscles, or Pneumatic Artificial Muscles (PAM). In principle, they consist of an inflateable rubber bladder inside a chinese finger trap cylindrical, helically wound braid. When air pressure is applied to the bladder, it inflates inside the constraining braid, which redirects the expansion force into a contractive force through changing it’s braiding angle.
📖 hackaday

X-crossing pneumatic artificial muscles on science.org
Festo Air Arm video
DIY McKibben Artificial Muscle video
Fishing line
-- :::danger
-- ## FALTA
-- :::

Nitinol
Nickel titanium, also known as nitinol, is a metal alloy of nickel and titanium, where the two elements are present in roughly equal atomic percentages.
Nitinol alloys exhibit two closely related and unique properties: the shape memory effect and superelasticity (also called pseudoelasticity). Shape memory is the ability of nitinol to undergo deformation at one temperature, stay in its deformed shape when the external force is removed, then recover its original, undeformed shape upon heating above its "transformation temperature". Superelasticity is the ability for the metal to undergo large deformations and immediately return to its undeformed shape upon removal of the external load. Nitinol can deform 10–30 times as much as ordinary metals and return to its original shape.
 
Video of tiny walker robot.
This Inch Worm walking robot is actuated by nitinol wire. Nitinol is an alloy that can 'remember' a given shape or in this case length. The Inch Worm is powered by 2 AA batteries, and when the button is pressed and a current flows though the nitinol wire, it becomes hot and this causes it to shorten, as it goes to its 'remembered' length. As the nitinol shortens, it causes the two robot legs to move apart. Then, when the current stops, the nitinol wire cools, and - aided by the spring - goes back to its former (longer) length.

Nitinol: The Shape Memory Effect and Superelasticity video
Tiny Robot Beetle Runs On Alcohol_ on hackaday.com
Extra videos
37 inflatable arm orange 2
The possibilities for robots are endless in a future when robotic manipulators are easy to install, transport, deploy, and are safe around people. However, most of today’s robots are rigid metal machines that require large safety cages and heavy equipment to install. This limits robots to work in isolation, doing the same task over and over again, for months or years at a time. To move the robotics industry forward we need to creative a need breed of machine.
📺 video on youtube.com
Universal Soft Robotic Gripper
Our research mainly focus on bio-inspired soft robotics that do work traditional rigid robots cannot handle
📺 video on youtube.com
Extreme Fast Cable-Driven Parallel Robot
With inspiration from spiders’ webs and the enormous load-bearing capacity of modern high-tech cables, future robots will use cables to get things moving in numerous application areas.
📺 video on youtube.com
Fishing Line Artificial Muscles
Ordinary, everyday fishing line has been used to produce artificial muscles with super human strength. By twisting and coiling simple fishing line and applying heat, powerful artificial muscles are produced. The new muscles can lift one hundred times more weight and generate one hundred times higher mechanical power than human muscle.
📺 video on youtube.com
Festo Air Arm (Artificial muscles)
Nature is our best engineer, and the finest robots are the ones that mimic it. Festo, a multinational robotics firm based in Germany, has made some of the most amazing biologically inspired robots out there.
📺 video on youtube.com
Universal Robot Gripper
In this project we show you how to make a universal robot gripper using an ordinary balloon and coffee grounds. Coffee grounds are placed in the balloon. When the balloon is inflated, the coffee grounds are loose and will easily move around an object. But when the air is sucked out of the balloon, the grounds are pulled together and grip the object from all sides. This works because of a process called "jamming": When a granular material such as coffee grounds is compressed, the friction between the grains locks them in place.
📺 video on youtube.com
High-speed SCARA parallel robot
This video shows DexTAR, a double-SCARA parallel robot, which is probably the best pedagogical example of a parallel mechanism
📺 video on youtube.com
Precise Hopping with Salto-1P
Salto-1P is a small monopedal jumping robot capable of continuous high-power hopping. We demonstrate a new control algorithm that can land Salto-1P's foot at particular spots on the ground like jumping on stepping stones or playing one-leg hopscotch.
📺 video on youtube.com
Laser Tracking System -using OpenCV 3.1 and Raspberry Pi 3
Final year project for Electrical and Electronic Engineering degree. Platform with a mounted laser pointer to track a person. Using OpenCV 3.1 and a Raspberry Pi 3.
📺 video on youtube.com